Image Segmentation
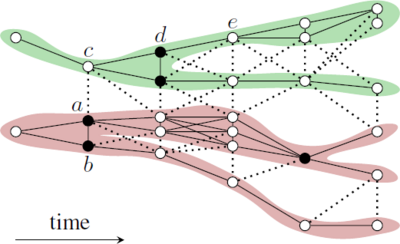
Moral Lineage Tracing
Lineage tracing, the tracking of living cells as they move and divide, is a central problem in biological image analysis. Solutions, called lineage forests, are key to understanding how the structure of multicellular organisms emerges. We propose an integer linear program (ILP) whose feasible solutions define, for every image in a sequence, a decomposition into cells (segmentation) and, across images, a lineage forest of cells (tracing). In this ILP, path-cut inequalities enforce the morality of lineages, i.e., the constraint that cells do not merge. To find feasible solutions of this NP-hard problem, with certified bounds to the global optimum, we define efficient separation procedures and apply these as part of a branch-and-cut algorithm. To show the effectiveness of this approach, we analyze feasible solutions for real microscopy data in terms of bounds and run-time, and by their weighted edit distance to lineage forests traced by humans.
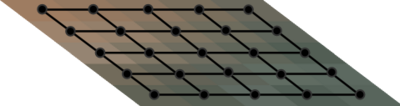
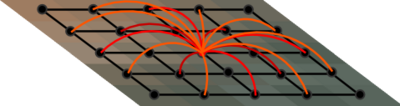
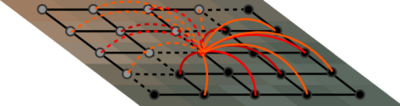
Efficient Decomposition of Image and Mesh Graphs by Lifted Multicuts
Formulations of the Image Decomposition Problem as a Multicut Problem (MP) w.r.t. a superpixel graph have received considerable attention. In contrast, instances of the MP w.r.t. a pixel grid graph have received little attention, firstly, because the MP is NP-hard and instances w.r.t. a pixel grid graph are hard to solve in practice, and, secondly, due to the lack of long-range terms in the objective function of the MP. We propose a generalization of the MP with long-range terms (LMP). We design and implement two efficient algorithms (primal feasible heuristics) for the MP and LMP which allow us to study instances of both problems w.r.t. the pixel grid graphs of the images in the BSDS-500 benchmark. The decompositions we obtain do not differ significantly from the state of the art, suggesting that the LMP is a competitive formulation of the Image Decomposition Problem. To demonstrate the generality of the LMP, we apply it also to the Mesh Decomposition Problem posed by the Princeton benchmark, obtaining state-of-the-art decompositions.
Joint object and scene segmentation with dynamic CRFs
This research project aims to improve scene and object segmentation by combining object detectors and bottom-up low-level segmentation in a joint CRF framework. Further improvement is achieved by a dynamic CRF over time.
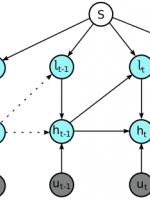
Sequential Bayesian Model Update under Structured Scene Prior
We aim for vision systems that continuously operate in the real-world, where unforeseen conditions not represented in the training set are likely to occur. In order to equip systems with the ability to cope with such situations, we would like to enable adaptation to such new situations and conditions under certain assumptions.